publications
† denotes corresponding author.
- RSSSemantically Structured Mixture-of-Experts for Compositional Robotic ManipulationIn Robotics: Science and Systems (RSS),
- IROSKeypose Exploration: Efficient Automatic Trajectory Labelling and Cross-Embodiment Policy TransferIn 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
- TASE
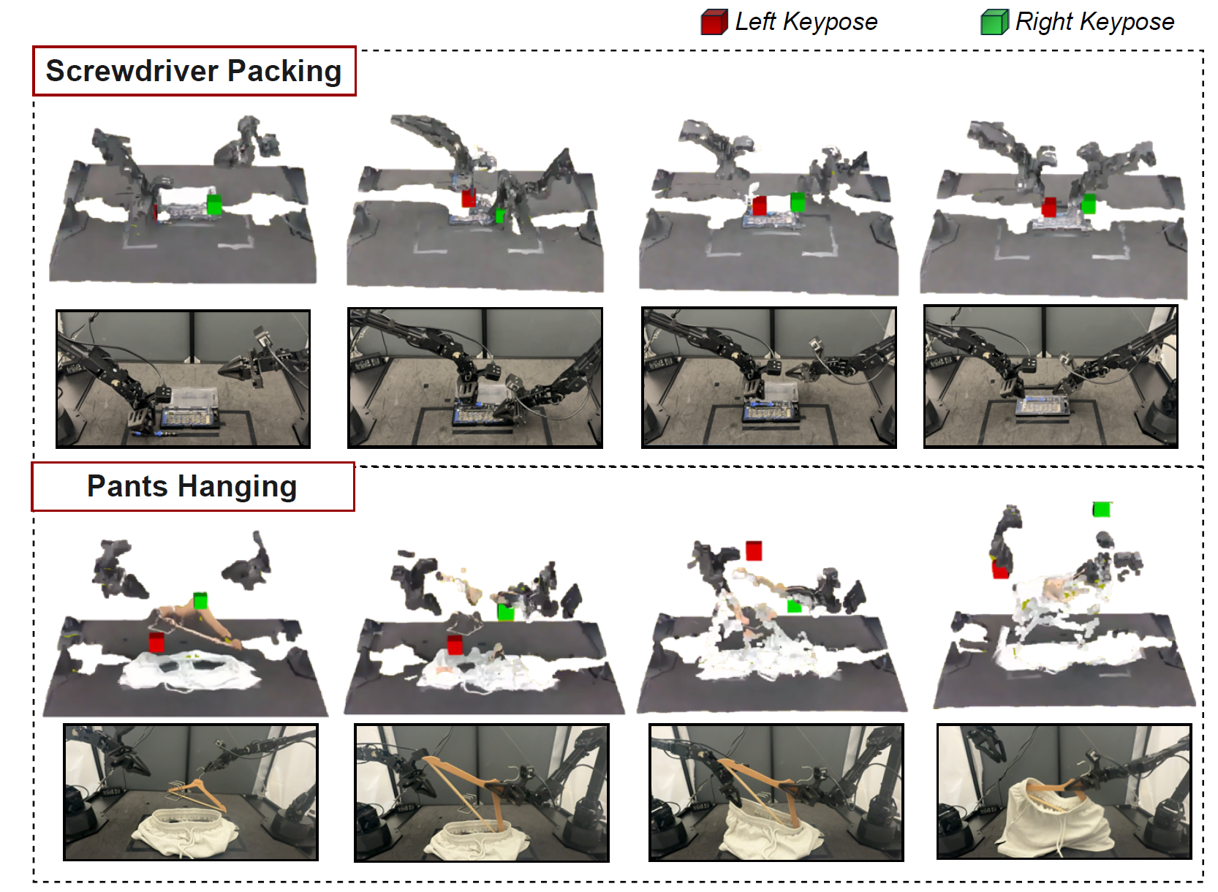 BiKC+: Bimanual Hierarchical Imitation with Keypose-Conditioned Coordination-Aware Consistency PoliciesIEEE Transactions on Automation Science and Engineering,To appear, Yizhou Chen is the co-corresponding author
BiKC+: Bimanual Hierarchical Imitation with Keypose-Conditioned Coordination-Aware Consistency PoliciesIEEE Transactions on Automation Science and Engineering,To appear, Yizhou Chen is the co-corresponding author - RSS
- RA-LBagIt! An Adaptive Dual-Arm Manipulation of Fabric Bags for Object BaggingIEEE Robotics and Automation Letters,
- RA-LSignage-Aware Exploration in Open World using Venue MapsIEEE Robotics and Automation Letters,
- ROBIOSynergistic Temporal Logic Planning for an Aerial GripperIn ,Best Paper Finalist in Automation
- ROBIOA Self-evolving Digital Twin System Architecture for Indoor UAV Management Based on Online LearningIn 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO),
- WAFRBiKC: Keypose-Conditioned Consistency Policy for Bimanual Robotic ManipulationIn The 16th International Workshop on the Algorithmic Foundations of Robotics (WAFR),
- RSSLanguage-Augmented Symbolic Planner for Open-World Task PlanningIn Robotics: Science and Systems (RSS),Accepted
- CDCOA-ECBVC: A Cooperative Collision-free Encirclement and Capture Approach in Cluttered EnvironmentsIn IEEE Conference on Decision and Control (CDC),
- ICRASensor-based multi-robot search and coverage with spatial separation in unstructured environmentsIn 2023 IEEE International Conference on Robotics and Automation (ICRA),
- ICRAAir bumper: A collision detection and reaction framework for autonomous MAV navigationIn 2024 IEEE International Conference on Robotics and Automation (ICRA),Yizhou Chen is the corresponding author
- IROSMulti-view Stereo with Learnable Cost MetricIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
- IROS
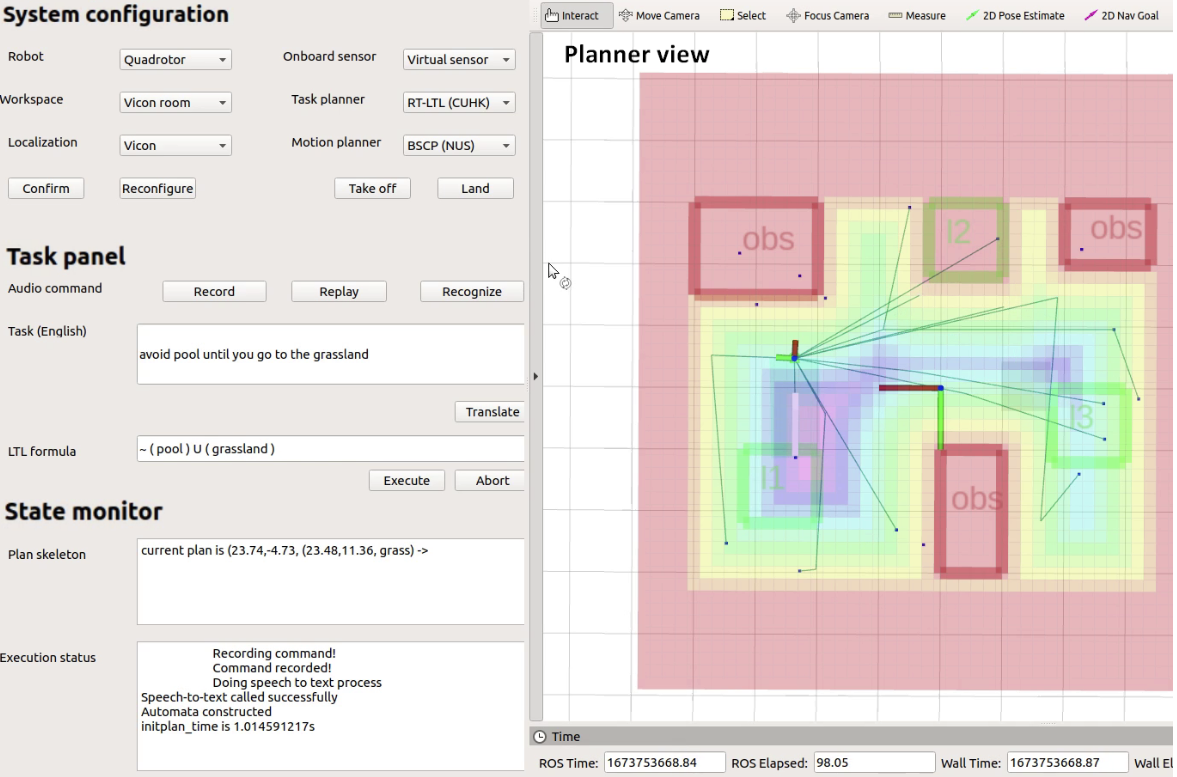 An interactive system for multiple-task linear temporal logic path planningIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
An interactive system for multiple-task linear temporal logic path planningIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), - TITSVDTNet: A high-performance visual network for detecting and tracking of intruding dronesIEEE Transactions on Intelligent Transportation Systems,
- GNCDecentralized MPC-based trajectory generation for multiple quadrotors in cluttered environmentsGuidance, Navigation and Control,
- RCARA GPU Mapping System for Real-time Robot Motion PlanningIn 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR),