Chen Yizhou
The University of Hong Kong · School of Computing and Data Science

The University of Hong Kong
School of Computing and Data Science
Room 416, F core, Cyberport, Pokfulam, Hong Kong
Tel: (+852) 97004508
E-mail: yzhchen@hku.hk
I am a postdoctoral fellow at School of Computing and Data Science, The University of Hong Kong, under the leadership of Prof. Jia Pan. Before that, I obtained my Ph.D. degree at Mechanical and Automation Engineering department, The Chinese University of Hong Kong, supervised by Prof. Ben M. Chen.
Research Interests
- During Ph.D., I dedicated myself in developing intelligent robot planning and perception algorithms that enables real-world tasking.
- After graduation, I shifted my interest in more challenging manipulation tasks that involves intricate physical constraints and human preference.
- My current research interests lies in enhancing the performance of long-horizon manipulation tasks.
news
| Apr 01, 2026 | Our paper “Semantically Structured Mixture-of-Experts for Compositional Robotic Manipulation” has been accepted by RSS 2026. |
|---|---|
| Dec 01, 2025 | Our paper “BiKC+: Bimanual Hierarchical Imitation with Keypose-Conditioned Coordination-Aware Consistency Policies” has been accepted by T-ASE 2025. |
| Dec 01, 2024 | Our paper “Synergistic temporal logic planning for an aerial gripper” is selected as Best Paper in Automation Finalist of ROBIO 2024. |
selected publications
- TASE
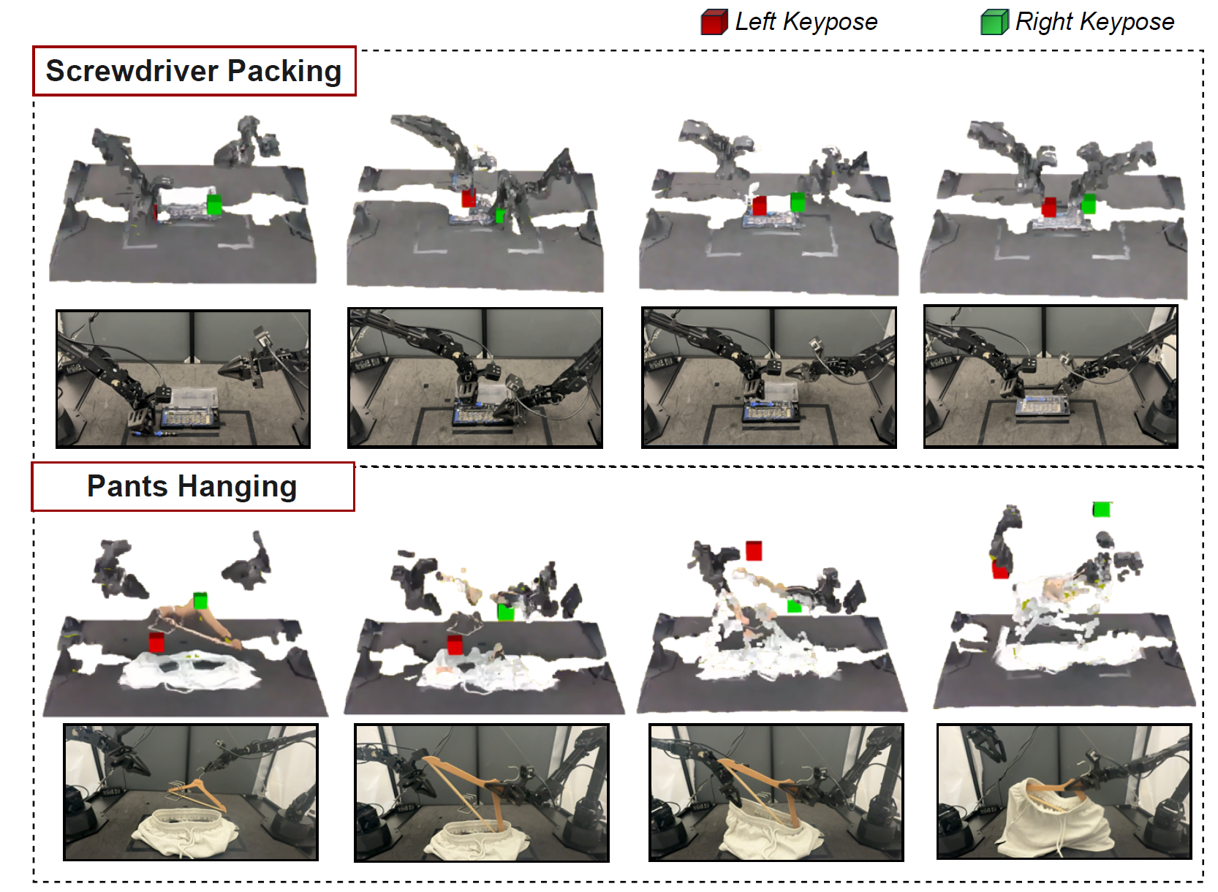 BiKC+: Bimanual Hierarchical Imitation with Keypose-Conditioned Coordination-Aware Consistency PoliciesIEEE Transactions on Automation Science and Engineering,To appear, Yizhou Chen is the co-corresponding author
BiKC+: Bimanual Hierarchical Imitation with Keypose-Conditioned Coordination-Aware Consistency PoliciesIEEE Transactions on Automation Science and Engineering,To appear, Yizhou Chen is the co-corresponding author